



















近日,中科融合算法负责人程诚博士出席参加2024新能源汽车车身&底盘轻量化与降本策略研讨会,并在会上首次发布了中科融合高功率激光多线扫描技术,直击焊接场景中的视觉方案痛点。

在国内制造业转型升级的推动下,结合焊接领域劳动力短缺及用工成本上升等多重因素,焊接自动化与智能化已成为行业发展的重要趋势,体现在对生产效率的显著提升、焊接质量的一致性保障以及对市场需求变化的快速响应。通过引入先进技术,如人工智能和机器视觉,焊接过程变得更加精准和灵活,能够有效降低人为因素带来的风险。同时,智能化系统的应用有助于实现数据驱动的决策,从而优化生产流程和资源配置,进一步推动行业向高效、低成本和高质量的方向发展。
焊接场景视觉方案痛点
3D视觉技术在焊接自动化中可实现精准定位与对接、实时监测与反馈、缺陷检测、自动编程,可增强增强生产灵活性、提高人机协作效率,这些赋能使得焊接自动化在精度、效率和质量控制等方面得到了显著提升,推动了行业的发展。而与此同时,焊接场景中的视觉方案也存在以下痛点:
1不锈钢工件互反导致视觉方案成像不清晰

2强光/弧光导致视觉方案成像不清晰

3现场部署复杂开发成本高
4对器件热稳定性要求高

焊接领域主流视觉方案技术原理
当前,焊缝跟踪技术是焊接过程中纠偏的重要手段,机器人的焊缝识别与跟踪依赖于传感技术。目前,主要通过线激光和结构光两种技术路线实现。
1.线激光/线结构光是指投射单个线条,通过提取相机捕获光束中心亮线的方式匹配同名点。

线激光适用于高精度要求的场景,但其在焊接应用中也存在一些局限性。例如,由于其采用逐点扫描,扫描速度相较于3D结构光稍显缓慢,从而影响焊接效率。此外,精密的激光系统成本较高,增加了设备及维护的费用。
2.面结构光/3D结构光是指投射相移条纹+格雷码条纹,通过解算相位的方式匹配同名点。
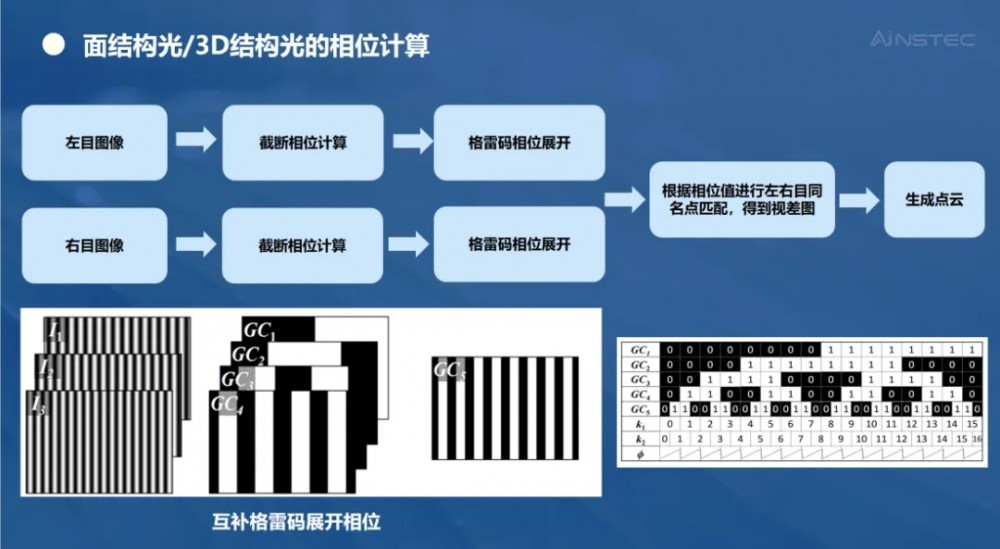
面结构光/3D结构光技术更适合于大范围工件的快速扫描,这一技术通过投射光栅并分析其变形来获取三维信息,从而实现较快的扫描速度,有助于提高焊接效率。然而,3D结构光技术也存在一些局限性,由于其基于光栅投影,精度通常低于线激光相机,因此在高精度焊接场景中可能表现不足。
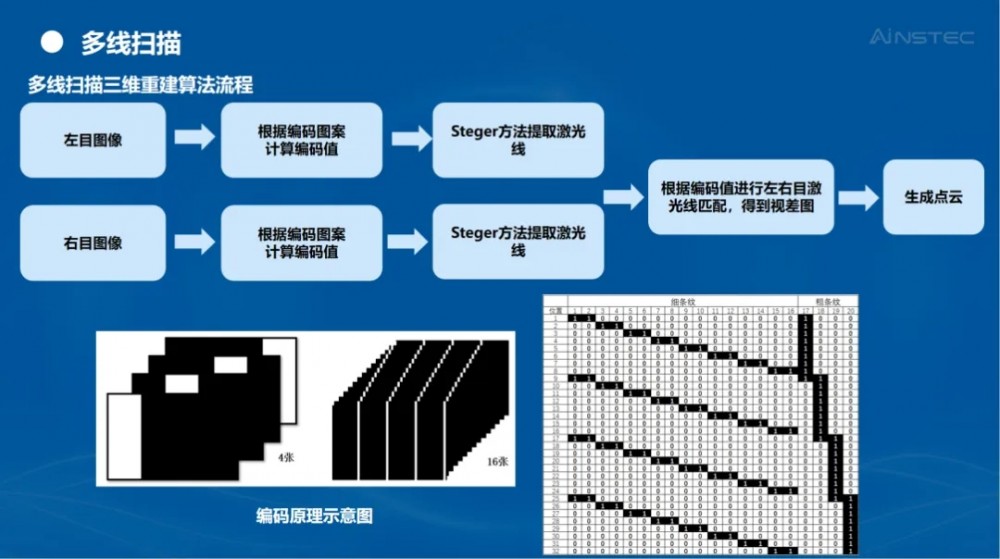
3.多线扫描
为了解决线激光和结构光两种技术路线分别存在的缺陷,结合两者的优势,中科融合自主开发高功率激光多线扫描技术,在同一台相机上可实现多线扫描、面结构光扫描,既保证高精度,又提高扫描速度。该技术具备使用简单,不需要配合位移的机械结构、高精度、能直接生成场景的完整点云、抗反光能力强、能够兼容面结构光等特点。

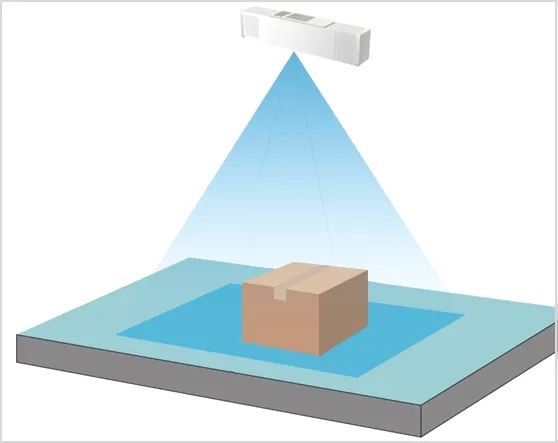
多线扫描投射示意图
算法层面,多线扫描可投射一组编码的多线线条,通过编码的方式解决多个线条匹配干扰的问题。
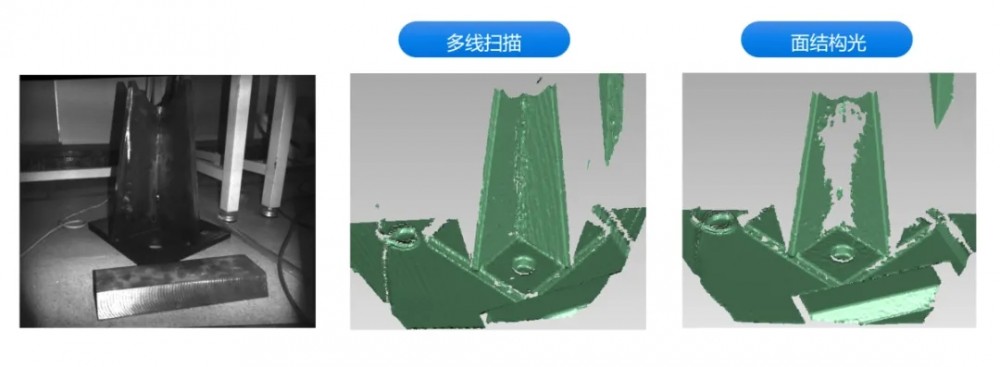
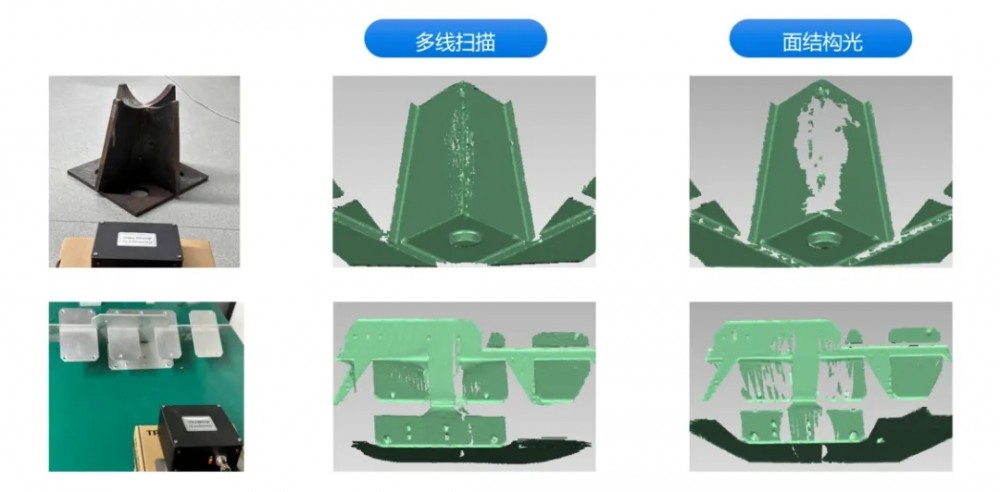
多线扫描成像效果对比
扫描精度:多线扫描与面结构光对比

抗互反能力:多线扫描与面结构光对比
抗强光能力:多线扫描与面结构光对比
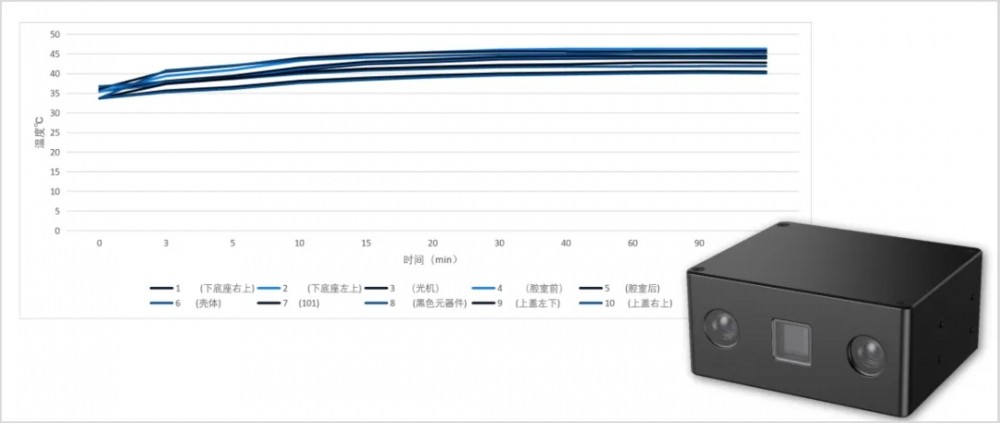
多线扫描的热稳定性
在40℃测试条件下,进行连续工作模式(频率1s/次),至其温度稳定时的温升情况如下图:
焊接领域几种视觉方案的优劣势对比
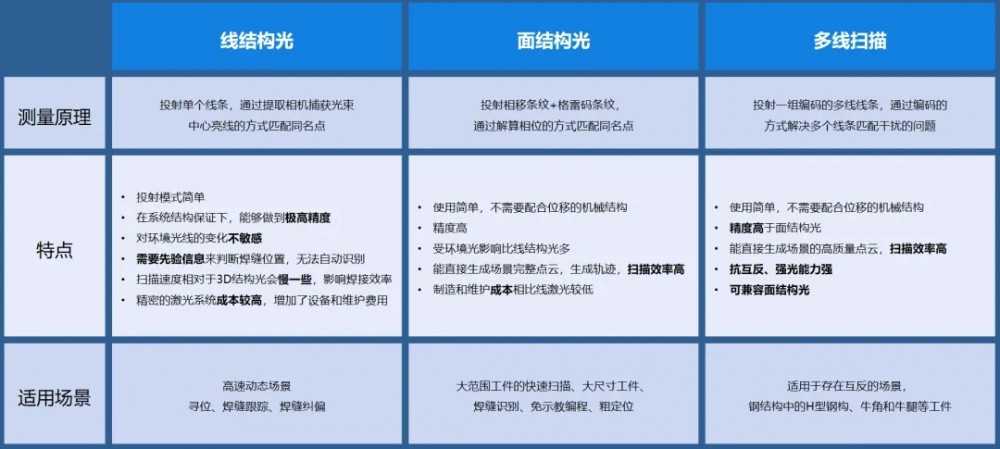
通过焊接领域主流视觉方案的技术优劣对比可知,多线扫描技术使用简单,不需要配合位移的机械结构、精度高于面结构光、能直接生成场景的高质量点云,扫描效率高、抗互反、强光能力强、可兼容面结构光,适用于存在互反的场景,钢结构中的H型钢构、牛角和牛腿等工件,解决了当前焊接场景中的视觉方案痛点。
中科融合焊接领域视觉解决方案
结合多线扫描技术,中科融合全新升级了MINI F紧凑型高精度3D成像模组。
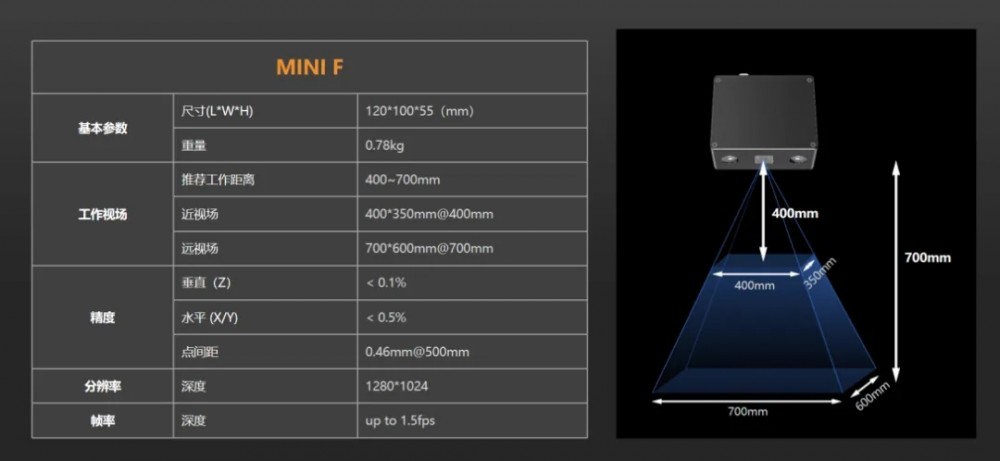
MINI F是专为焊接场景设计开发,可内嵌或安装在协作机器人手臂上的轻量化、高性能3D成像模组,该相机基于Ainstec 第二代深度相机架构设计,引领眼上手深度相机的性能革新,为协作机器人赋予强大深度感知能力。超小型3D成像模组,体积小、重量轻,方便安装于机械臂上;采用大功率激光光源,抗环境光干扰能力极强。可广泛适用中、近距离高精度引导、抓取、焊缝寻位等场景。

升级后的MINI F紧凑型高精度3D成像模组在原有功能基础上配备了增强型硬件盖板,具备抗高温和防火花的设计,确保在极端环境下的稳定性和可靠性。这一创新使得相机在焊接高温作业中能够有效防止热损伤和火花侵害,从而延长设备的使用寿命。
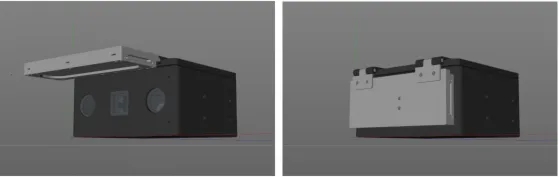
MINI F硬件盖板示意图
同时,MINI F支持气冷和水冷系统,进一步提升了其散热能力,确保在长时间高强度工作条件下,设备仍能保持良好的性能表现。这些特点使得MINI F紧凑型高精度3D成像模组成为工业应用中的理想选择,能够在严苛的操作环境中持续提供高质量的三维视觉数据。
结语
未来,中科融合将持续致力于技术的迭代与创新,通过引入更先进的3D视觉技术,逐步提升焊接过程的效率和精度,有效推动整个行业的升级转型,赋能焊接自动化的发展。我们坚信,通过不断的技术进步与应用实践,能够为客户创造更大的价值,并引领焊接领域迈向智能化、自动化的新纪元。
-bibo必博官网


扫一扫,关注我们!



 您当前的位置:
您当前的位置: